All flexyPage displays support the open standard CANopen-Lift. If the lift control supports the standard as well, the installation and setup is simple. This is due to the plug and play abilities of the standard. In this case the complete information of the lift is available to the display. If the lift possesses an old discrete control system or a proprietary bus system the flexyPage displays can be used as well. In this case the necessary signals can be provided with the help of an I/O module. Additionally, sensors can be connected to the display that enable supplement functions, which are usually limited to modern lifts with CANopen controllers.
Lift with CANopen
The connection to a lift with the CANopen-Lift standard is very easy. Nonetheless the installation has to be made by a specialist, who is familiar with the security requirements for the work at electric constructions of lifts.
Every flexyPage display comes with a CAN bus interface. The interface terminals have to be connected with the bus of the construction using only two twisted wires. The standard sets the wire colors of white for CAN H and blue for CAN L. Next, the termination of the CAN bus has to be checked and possibly adjusted.
After the login into the user interface of the flexyPage display the NodeID and the baud rate have to be set up. Now all messages on the bus of the lift are available for the display as well. You can now use the widgets you need for your application.
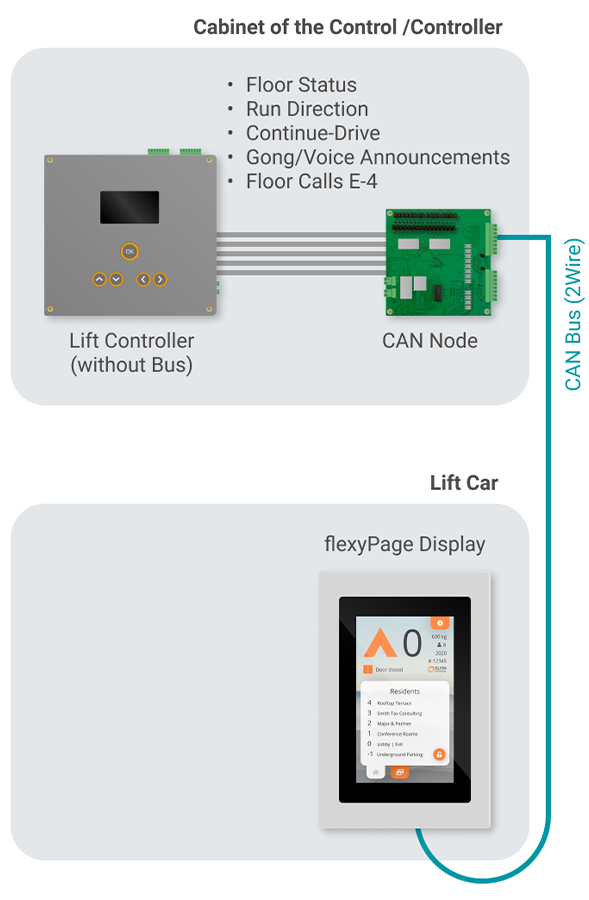
Lift without CANopen
For lifts that do not support CANopen-Lift the necessary signals can be provided by an external I/O module. The I/O module can be integrated directly at the signals' origin, for example, in the cabinet of the control or in the terminal. For data connection to the display only 2 twisted wires are necessary. The I/O modules are available from different manufacturers freely on the market.
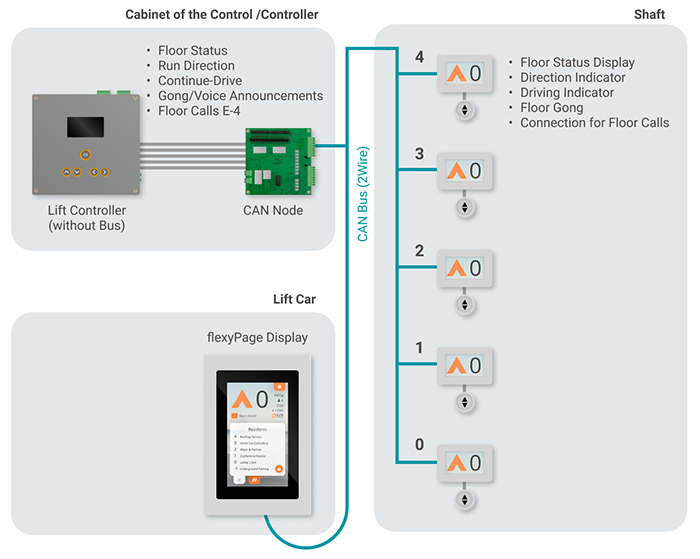
Additional Shaft Installation
If, in the course of modernisation, LED displays on the floors are to be retrofitted, the whole shaft installation can occur via a CANopen installation controlled by a flexyPage display. This way the wiring in the shaft necessitates only two twisted wires and besides the exterior calls it is possible to output floor status, run direction, departing arrows, floor bell and special texts.
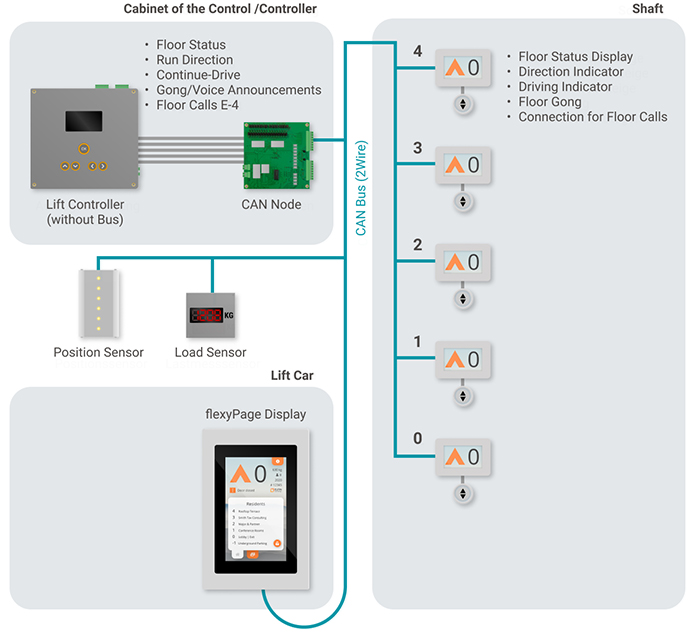
Additional Sensors
If additional sensors are needed, which cannot be provided by the existing control, the necessary sensors can be connected directly to the CAN bus. This way, it is possible to show, for example, the current weight or the position and speed in the lift car.